CHANGE_P-ORDER
Nodes and connectivity
"Optional title"
entype, enid, order, gid
Parameter definition
Description
Change element polynomial order in a selected region of a part or part set. The polynomial order can only be increased, not decreased. One can change linear to quadratic or cubic, and quadratic to cubic.
Example
Change of polynomial order
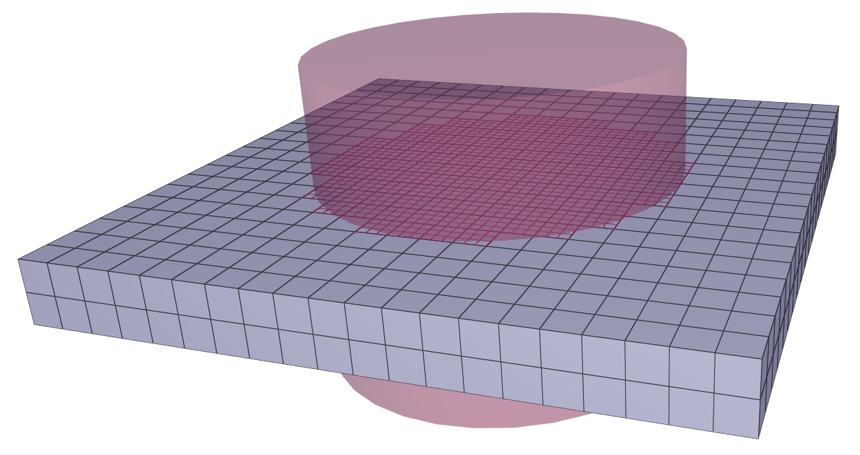
The following command defines a region in space where linear elements are converted to cubic.
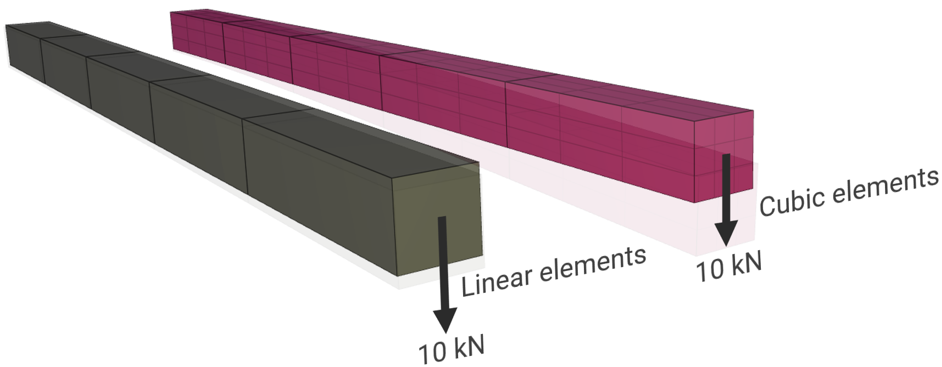
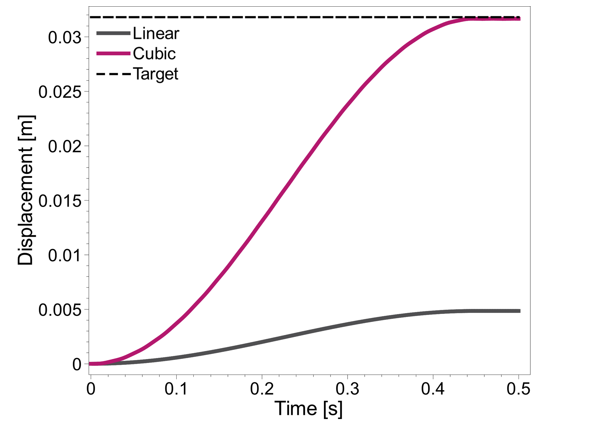
Linear vs. cubic elements
Two cantilever beams are subjected to a transverse point load at the unconstrained end. One of the beams is modeled with five LHEX (Linear hexagonal) elements and the other with five CHEX (Cubic hexagonal) elements. From Euler-Bernoulli beam theory, the maximum deflection, $\mathbf\delta_{max}$ is:
$\mathbf\delta_{max} = \displaystyle{ \frac{PL^3}{3EI} } = \displaystyle{ \frac{1.0e4 \cdot 1.0^3}{3 \cdot 200e9 \cdot \frac{0.05 \cdot 0.05^3}{12}} = 32 mm}$
where, $P$ is the applied load, $L$ is the length of the beam, $E$ is the elastic modulus and $I$ is the moment of inertia. The higher order elements are superior to the linear elements for this model setup.