BC_MOTION
Boundary conditions
"Optional title"
coid
entype, enid, bc${}_{tr}$, bc${}_{rot}$, csysid${}_{tr}$, csysid${}_{rot}$, $t_{beg}$, $t_{end}$
pmeth${}_1$, direc${}_1$, cid${}_1$, $sf_1$, fid${}_1$
.
pmeth${}_n$, direc${}_n$, cid${}_n$, $sf_n$, fid${}_n$
Parameter definition
Description
Definition of kinematic boundary conditions. When referring to a local cylindrical coordinate system (csysid${}_{tr}$), X corresponds to the radial direction, Y to the tangential direction and Z to the axial direction.
The optional activation function is used to define more complex switches than a simple activation/deactivation time. fid${}_n$ refers to the ID of a FUNCTION. The prescribed motion (or rotation) is active if the specified FUNCTION returns a value > 0.
Reaction forces, torques and external work are written to the ASCII file prescribed.out. Resulting torques on rigid bodies are expressed in the local rotational coordinate system (csysid${}_{rot}$). If a rotational coordinate system has not been defined, then the torques are presented with respect to the center-of-gravity.
Example
Constraining rigid body with part
The following commands constrain the rigid body with part ID 333 in translation (all directions) and in rotation around the global x- and y-axes. A prescribed spin (100 rad/s) is defined around the z-axis. The title will show up in the ASCII file prescribed.out and helps the user distiguish between different BC_MOTION definitions in the input deck.
Constraints applied in cylindrical coordinate system
Constraints can be applied in a cylindrical coordinate system. The example below constrains the tangential motion of a node set. The polar coordinate system has its center at (%xc, %yc, %zc) and its axial direction is (%xn, %yn, %zn). The tangential motion of the nodes in the set is constrained by setting bc${}_{tr}$=Z.
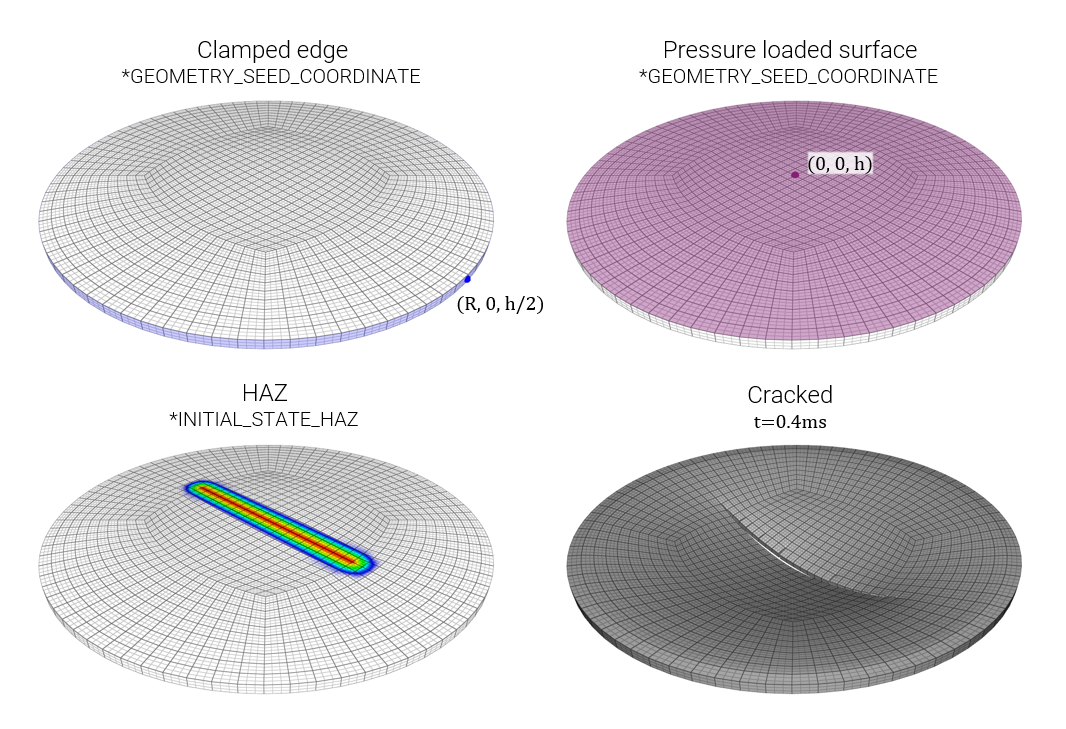
Clamping of disk edge using seed coordinate
Two surfaces on a disk, edge and top face, are defined using GEOMETRY_SEED_COORDINATE. The edge is referenced by BC_MOTION and the top face is used by LOAD_PRESSURE.