
MAT_BERGSTROM_BOYCE
FE
Material properties
Deprecated command
This command is deprecated and will be removed in the next major release.
Do not use this command in new input files, automated workflows, or production models. Continued use may result in broken workflows after upgrade. Please migrate to the supported alternative immediately.
"Optional title"
mid, $\rho$, $K$
$\mu$, $\lambda_L$, $a_0$, $a_1$, $\eta_\mathrm{max}$, $\dot{\gamma}_0$, $\xi$, $B$
$\sigma_0$, $Q$, $C$, $m$, $c_{dec}$, $\beta$, $W_c$, $\lambda_f$
$b_0$, $b_1$, $b_2$, $\mu_B$, erode
Parameter definition
Description
Model for polymers. It is based the Bergstrom-Boyce model, but has an optional different treatment of viscous effects.
The rheological model consists of two parallell networks, here referred to as Network A and Network B.
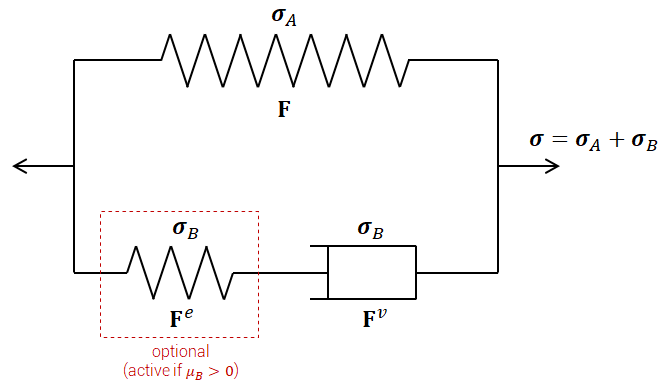
The total stress in the material $\mathbf \sigma$ is the sum of stresses in the two networks.
$\boldsymbol{\sigma} = \boldsymbol{\sigma}_A + \boldsymbol{\sigma}_B$
Network A is hyperelastic with damage and its stress is defined as
$\displaystyle{\boldsymbol{\sigma}_A = (1 - \eta) \cdot \frac{\mu}{J \bar\lambda} \cdot \frac{\mathcal{L}^{-1}\left( \bar\lambda / \lambda_L \right)} {\mathcal{L}^{-1}\left( 1 / \lambda_L \right)} \cdot \bar{\mathbf{C}}_{dev} + K \cdot \mathrm{ln}(J) \mathbf{I}}$
where $\mu$, $\lambda_L$ and $K$ (bulk modulus) are material parameters. $\mathcal{L}^{-1}$ is the inverse of the Langevin function, $J = \mathrm{det}\mathbf{F}$ and $\bar{\mathbf{C}}_{dev}$ is the deviatoric part of $\bar{\mathbf{C}}$:
$\displaystyle{\bar{\mathbf{C}} = J^{-2/3} \mathbf{F}^t \mathbf{F}}$
$\bar\lambda$ is a measure of the network stretch:
$\displaystyle{\bar\lambda = \sqrt{\frac{\mathrm{tr} \bar{\mathbf{C}}}{3}}}$
$\eta$ is the network damage and it evolves according to
$\displaystyle{\dot\eta = a_0 \cdot (\eta_{max} - \eta) \cdot \left( \frac{\bar\lambda}{\lambda_L} \right)^{a_1} \cdot \dot{\bar\lambda}}$
$\lambda_f$ is an optional failure stretch. The material will fail instantaneously if $\bar\lambda > \lambda_f$.
Network B is visco-elastic (if $\mu_B>0$) or purely viscous (if $\mu_B=0$). The stress in the elastic network is defined as:
$\displaystyle{\boldsymbol{\sigma}_B = \frac{\mu_B}{J^e \bar\lambda^e} \cdot \frac{\mathcal{L}^{-1}\left( \bar\lambda^e / \lambda_L \right)} {\mathcal{L}^{-1}\left( 1 / \lambda_L \right)} \cdot \bar{\mathbf{C}}^e_{dev}}$
where $J^e = \mathrm{det}\mathbf{F}^e$ and $\bar{\mathbf{C}}^e_{dev}$ is the deviatoric part of $\bar{\mathbf{C}}^e$:
$\displaystyle{\bar{\mathbf{C}}^e = (J^e)^{-2/3} (\mathbf{F}^e)^t \mathbf{F}^e}$
$\bar\lambda^e$ is a measure of the elastic network stretch:
$\displaystyle{\bar\lambda^e = \sqrt{\frac{\mathrm{tr} \bar{\mathbf{C}}^e}{3}}}$
Two different relationships between viscous stress and deviatoric strain rate are offered.
Alternative 1:
The effective viscous stress $\sigma_B^{eff}$ is defined from the relationship:
$\displaystyle{ \dot{\bar{\varepsilon}}^v_{dev} = \dot{\gamma}_0 ( \bar{\lambda}^v - 1 + \xi)^B \cdot \left( \frac{\sigma_B^{eff}}{\sigma_0 + Q\cdot(1 - \mathrm{exp}(-C \varepsilon^{eff})} \right)^m \cdot \frac{\boldsymbol{\sigma}_B}{\sqrt{\boldsymbol{\sigma}_B : \boldsymbol{\sigma}_B}} }$
where $\dot{\bar{\varepsilon}}^v_{dev}$ is a time averaged deviatoric strain rate:
$\displaystyle{ \dot{\bar{\varepsilon}}^v_{dev} = \frac{1}{c_{dec}} \int_0^t \dot{\varepsilon}^v_{dev} \cdot \mathrm{e}^{(\tau-t)/c_{dec}} \mathrm{d}\tau}$
and:
$\displaystyle{\bar\lambda^v = \sqrt{\frac{\mathrm{tr} \bar{\mathbf{C}}^v}{3}}}$
Alternative 2:
$\displaystyle{ \sigma_B^{eff} = b_0 (\bar{\lambda}^v - 1 + \xi)^{b_1} \cdot \left( \frac{ \dot{\bar{\varepsilon}}_{dev}^{eff}}{\dot{\gamma}_0} \right)^{b_2} }$