INITIAL_VELOCITY
Initial conditions
*INITIAL_VELOCITY
entype, enid, $v_{x0}$, $v_{y0}$, $v_{z0}$, $\omega_x$, $\omega_y$, $\omega_z$
$x_0$, $y_0$, $z_0$, $\delta v_x$, $\delta v_y$, $\delta v_z$, csysid
entype, enid, $v_{x0}$, $v_{y0}$, $v_{z0}$, $\omega_x$, $\omega_y$, $\omega_z$
$x_0$, $y_0$, $z_0$, $\delta v_x$, $\delta v_y$, $\delta v_z$, csysid
Parameter definition
Variable
Description
entype
Entity type
enid
Entity identification number
$v_{x0}$
Initial velocity in x-direction
$v_{y0}$
Initial velocity in y-direction
$v_{z0}$
Initial velocity in z-direction
$\omega_x$, $\omega_y$, $\omega_z$
Initial angular velocity vector
$x_0$, $y_0$, $z_0$
Center of rotation
$\delta v_x$, $\delta v_y$, $\delta v_z$
Gradient of velocity field
csysid
Optional local coordinate system ID
Description
This command is used to define initial velocities and initial angular velocities, applying to nodes and particles (PARTICLE_SOIL or PARTICLE_SPH). The command is additive and multiple velocity definitions are summed up to form a total velocity.
An initial velocity term of a node or a particle at coordinate $(x,y,z)$ is defined as:
$\left\{ \begin{array}{c} v_x \\ v_y \\ v_z \end{array} \right\} = \left\{ \begin{array}{c} v_{x0} \\ v_{y0} \\ v_{z0} \end{array} \right\} + \left\{ \begin{array}{c} x-x_0 \\ y-y_0 \\ z-z_0 \end{array} \right\} \times \left\{ \begin{array}{c} \omega_x \\ \omega_y \\ \omega_z \end{array} \right\} + \left\{ \begin{array}{c} \delta v_x (x-x_0) \\ \delta v_y (y-y_0) \\ \delta v_z (z-z_0) \end{array} \right\}$
Example
Initial velocity
The command below initializes the spin of rigid body with part id 333. The axis of rotation is defined from the spin vector (10,20,0) and the point (1,2,3).
*INITIAL_VELOCITY
P, 333, 0.0, 0.0, 0.0, 10.0, 20.0, 0.0
1.0, 2.0, 3.0
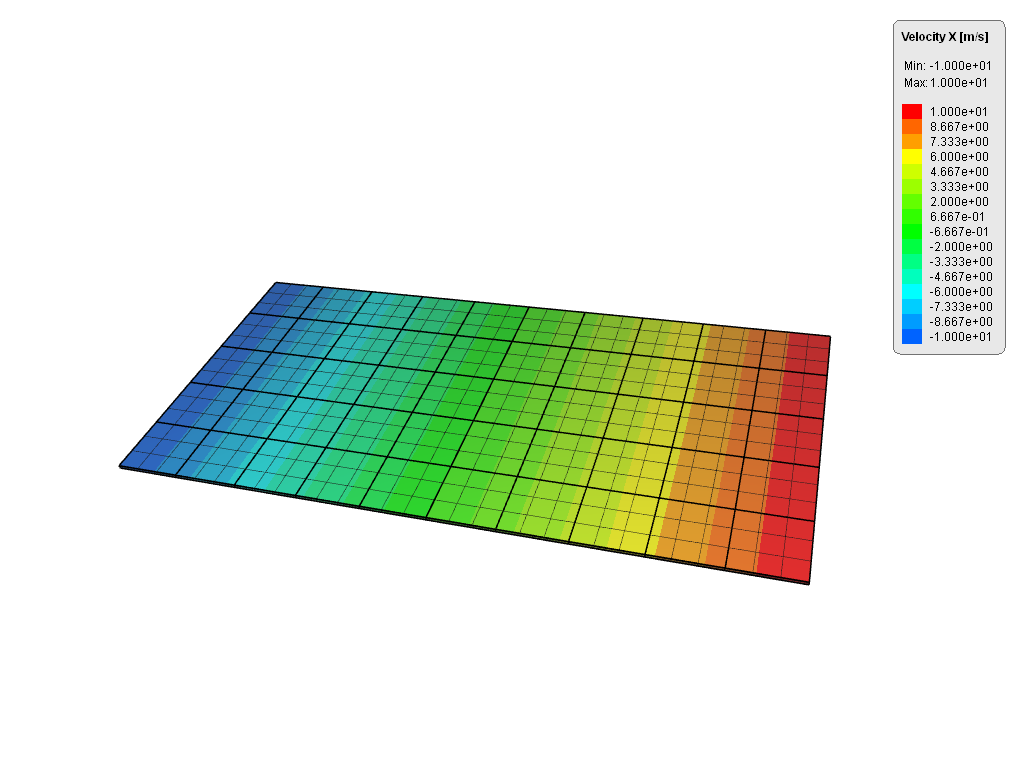
Initial velocity field using fcn
Complete command file of a rubber sheet that has been assigned a linear velocity field.
*UNIT_SYSTEM
SI
*TIME
0.01
*COMPONENT_BOX
1, 1, 10, 5, 1
-0.1, 0, 0, 0.1, 0.1, 0.001
*CHANGE_P-ORDER
ALL, 0, 3
*MAT_MOONEY_RIVLIN
1, 2000.0, 1.0e9
2.0e5, 2.0e5
*PART
"rubber sheet"
1, 1
*INITIAL_VELOCITY
P, 1, fcn(22)
*FUNCTION
22
100*x
*END