
CONNECTOR_SPR
Connectors
"Optional title"
coid, pid${}_s$, pid${}_m$, csysid
$R$, $h$, $m$, $f_n^{max}$, $f_t^{max}$, $d_n^{max}$, $d_t^{max}$, $\xi_n$
$\xi_t$, $a_1$, $a_2$, $a_3$
Parameter definition
Description
This is a point connector model that couples a group of nodes on a slave sheet with a group of nodes on a master sheet. The members in the groups are those nodes located inside the rivet, defined through location, radius and height. At least three nodes on each side are required for a consistent transfer of forces and moments. The rivet radius is automatically increased in case not enough nodes are located within the specified rivet geometry.
Hanssen et al. (2010) provides a detailed description of the model. A brief description follows below.
The rivet normal and shear forces are:
$\displaystyle{ f_n = \frac{d_n}{\eta^{max} d_n^{max}} \hat{f}_n (\eta^{max})}$
$\displaystyle{ f_t = \frac{d_t}{\eta^{max} d_t^{max}} \hat{f}_t (\eta^{max})}$
where $d_n$ and $d_t$ are the rivet elongations in the normal and tangential directions. $\eta^{max}$ is a damage measure that grows from 0 to 1.
$\dot{\eta}^{max} = \left\{ \begin{array}{c} \dot{\eta} : \eta = \eta^{max} \\ 0 : \eta \lt \eta^{max} \end{array} \right. $
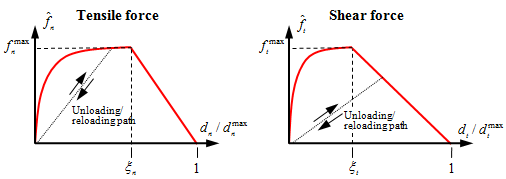
$\hat{f}_n (\eta^{max})$ and $\hat{f}_t (\eta^{max})$ are force-displacement curves (see figure below).
$\eta$ is a normalized effective displacement:
$\eta = \left( \xi + (1-\xi) a \right) \sqrt{ \left( \frac{d_n}{d_n^{max}} \right)^2 + \left( \frac{d_t}{d_t^{max}} \right)^2}$
$\xi$ is a parameter ranging from 0 to 1 and it scales the effective displacement as a function of the direction of the displacement vector in the $(d_t,d_n)$-plane.
$\displaystyle{ \xi = 1 - \frac{27}{4} \left( \frac{2\theta}{\pi}\right)^2 + \frac{27}{4} \left( \frac{2\theta}{\pi}\right)^3}$
where $\theta = \mathrm{arctan}(d_n/d_t)$. The directional scaling is allowed to change as damage evolves. This is done by defining the following relationship for the shape coefficient $a$:
$a = \left\{ \begin{array}{r} \displaystyle{ \frac{\xi_t - \eta^{max}}{\xi_t}a_1 + \frac{\eta^{max}}{\xi_t}a_2 {\mathrm{ }}: \eta^{max} \lt \xi_t} \\ \displaystyle{ \frac{1 - \eta^{max}}{\xi_t}a_2 + \frac{\eta^{max}-\xi_t}{\xi_t}a_3 {\mathrm{ }}: \eta^{max} \ge \xi } \end{array} \right.$