LOAD_FORCE_INTERACT
Boundary conditions
Beta command
This command is in the beta stage and the format may change over time.
"Optional title"
coid
entype${}_1$, enid${}_1$, entype${}_2$, enid${}_2$, fid, dtype, dynamic
Parameter definition
Description
This command is used to apply forces beteen two bodies. The force per unit body volume is defined by FUNCTION fid. The total force is obtained by integrating the force intensity over the volume of the first body.
The relative location of the bodies defines the direction of the force. The magnitude of the force is allowed to depend on their relative distance (intrinsic variable dist). There are two different relative distance options, dtype=0 and dtype=1.
If dtype=0 then we always find the nearest point on the second body for every point (element center) in the first body. If dtype=1 we do no work with local distances, but with the relative location of the bodies center of gravity. Note that if dtype=1 and the interacting bodies are slender (e.g. cables) then the local centers of gravity of the cross sections are used.
Example
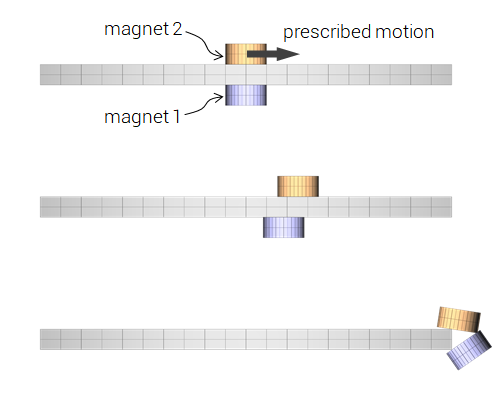
Two magnets
A model with two magnets separated by a board.