COORDINATE_SYSTEM_FUNCTION
Coordinate system
"Optional title"
csysid, $x_0$, $y_0$, $z_0$
$\hat{x}_x$, $\hat{x}_y$, $\hat{x}_z$, $\bar{y}_x$, $\bar{y}_y$, $\bar{y}_z$
Parameter definition
Description
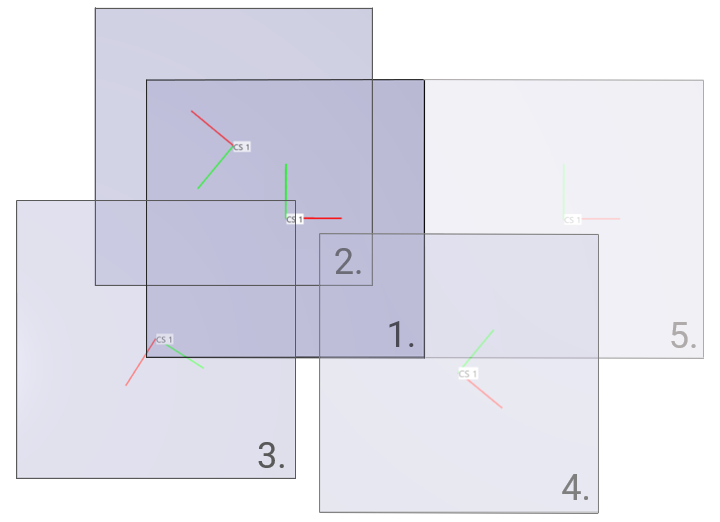
This command defines a local cartesian coordinate system. The parameters can either be constants or functions.
The origin is located at ($x_0$, $y_0$, $z_0$) and the local x-direction is ($\hat{x}_x$, $\hat{x}_y$, $\hat{x}_z$). The local z-direction is defined as $\hat{\mathbf{z}} = \hat{\mathbf{x}} \times \bar{\mathbf{y}} / \vert \hat{\mathbf{x}} \times \bar{\mathbf{y}} \vert$ and the local y-direction as $\hat{\mathbf{y}} = \hat{\mathbf{z}} \times \hat{\mathbf{x}}$.
Example
Coordinate system defined with functions
A local coordinate system with its origin following sensor ID=1 and with prescribed, time dependent, direction cosines.
The coordinate system is rotating 360° around its Z-axis and is used as a translational constraint for a box, restricting its motion in the current local Y- and Z-axis. The box is given a prescribed displacement in the X-direction.